
I am a Ph.D. candidate in the Luddy School of Informatics, Computing, and Engineering at Indiana University Bloomington, working with Lantao Liu in Vehicle Autonomy and Intelligence Lab and Roni Khardon in Machine Learning Research Group.
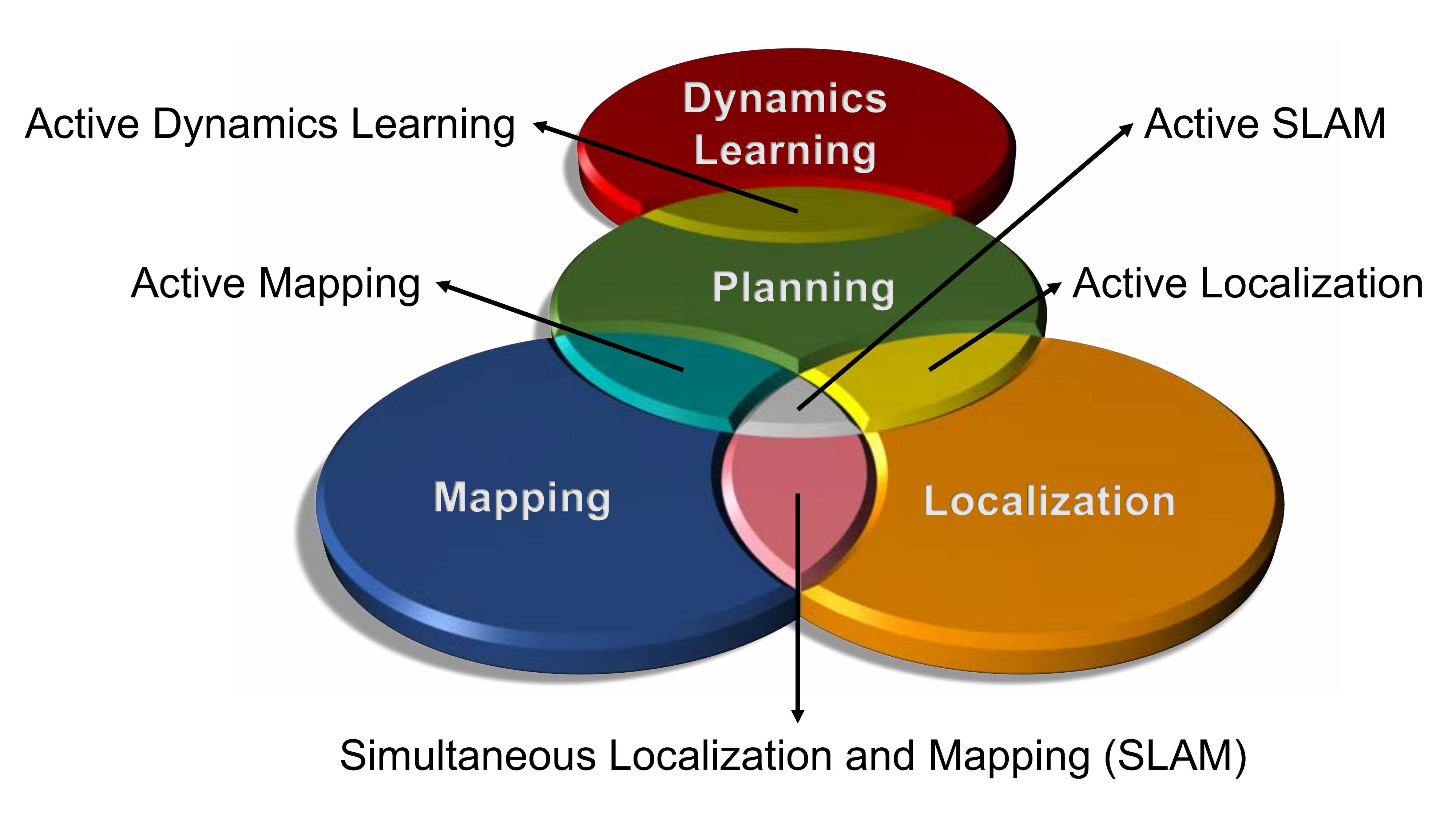
My research aims to empower robots to proactively interact with their environment and people, while effectively addressing uncertainty stemming from various sources. My Ph.D. research focuses on robotic information gathering, which encompasses data-efficient learning and information-driven planning and control.
I am happy to chat or collaborate with you! please feel free to reach out:
Updates
- Jun 2023 One paper got accepted to IJRR, discussing how non-stationary GPs enables more adaptive information gathering behaviors.
- May 2022 I started my second internship at Mitsubishi Electric Research Labs (MERL), working on quadrupedal robot.
- Apr 2023 One paper got accepted to IJCAI 2023. We propose an online planner based on differentiable symbolic propagation of distributions.
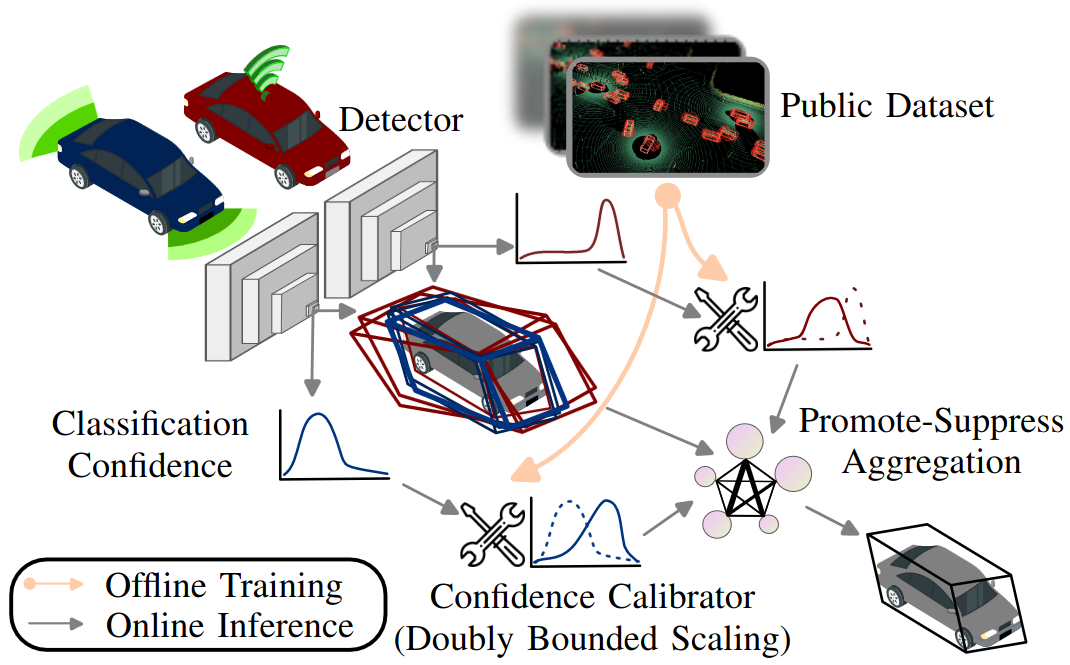
- Jan 2023 One paper got accepted to ICRA 2023. This paper suggests calibrating perception uncertainty in cooperative autonomous driving.
- Jun 2022 AK won the Best Student Paper Award at RSS 2022!
- May 2022 I started my summer internship at Mitsubishi Electric Research Labs (MERL), working on robotic manipulation.
- Apr 2022 Attentive Kernel (AK) got accepted to RSS 2022. AK improves spatial modeling accuracy and uncertainty quantification.
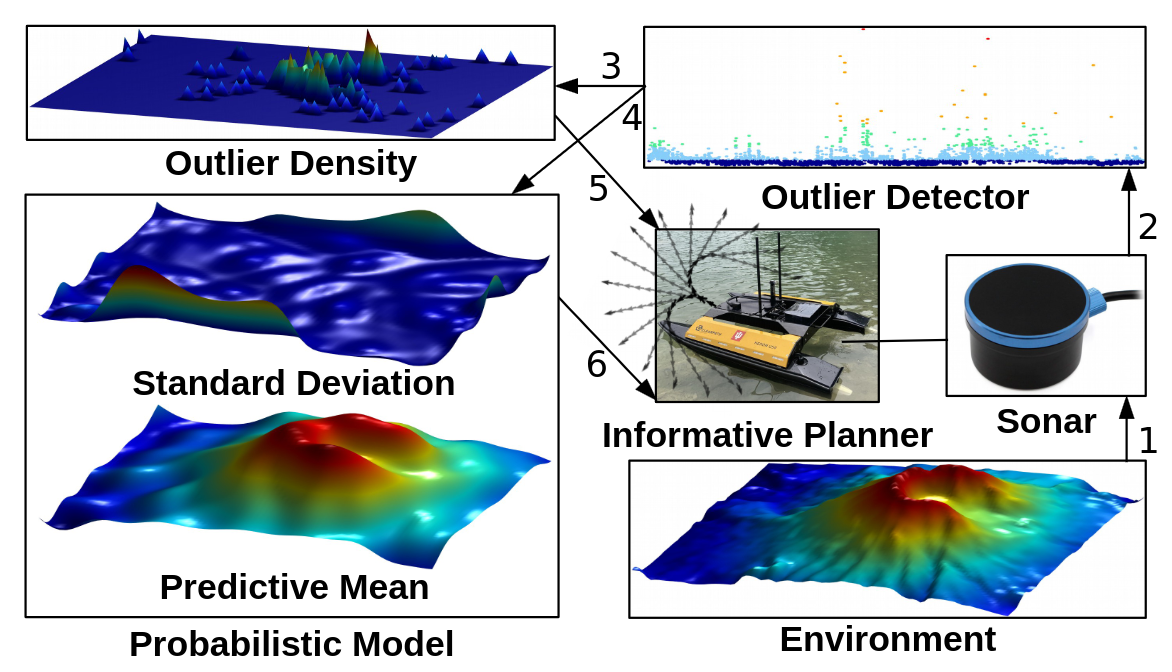
- Jan 2022 One paper got accepted to ICRA 2022. This work sheds light on the impact of outliers on active mapping.
- Dec 2021 Our work is posted on Amazon Research Awards.
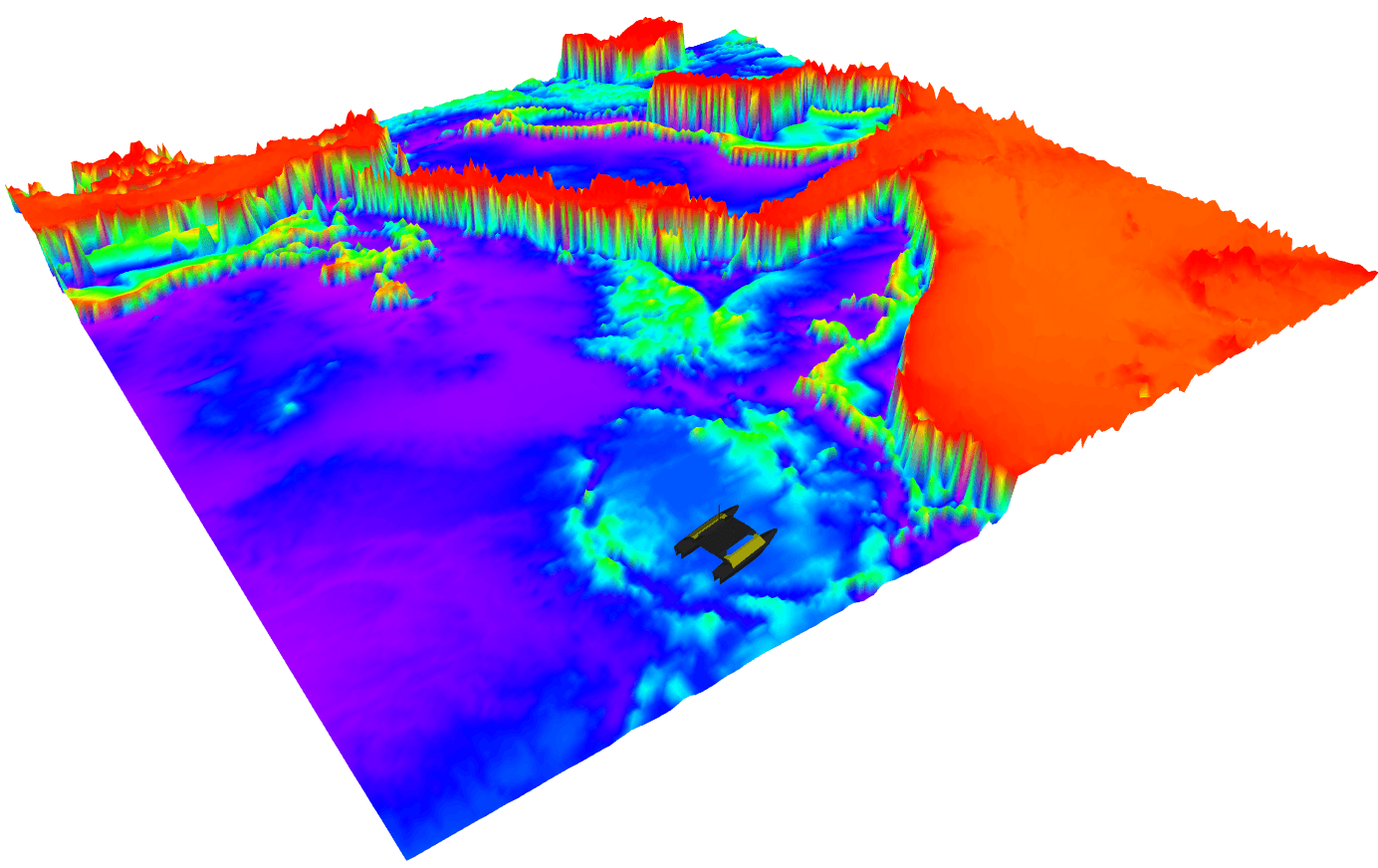
- Aug 2021 Spent two years on developing the Autonomous Surface Vehicle (ASV) and non-stationary Gaussian processes (GPs).
Released a ROS package for the BlueRobotics single-beam sonar driver.
Released a ROS package of tracking PID controller for differential-drive vehicles. - Oct 2019 Presented one work at OCEANS 2019 Seattle. We apply streaming sparse GP regression to environmental monitoring.
- Sep 2019 One paper got accepted by CDC 2019, extending ParetoMCTS to spatiotemporal scenarios.
- Jun 2019 ParetoMCTS got accepted by RSS 2019. This work generalizes Monte Carlo tree search to multi-objective informative planning.
Publications
|
Adaptive Robotic Information Gathering via Non-Stationary Gaussian Processes
Weizhe Chen, Roni Khardon, Lantao Liu
|
|
DiSProD: Differentiable Symbolic Propagation of Distributions for Planning
Palash Chatterjee, Ashutosh Chapagain, Weizhe Chen, Roni Khardon
|
|
|
Model-Agnostic Multi-Agent Perception Framework
Runsheng Xu*, Weizhe Chen*, Hao Xiang*, Xin Xia, Lantao Liu, Jiaqi Ma
|
|
AK: Attentive Kernel for Information Gathering
Weizhe Chen, Roni Khardon, Lantao Liu
|
|
|
Informative Planning in the Presence of Outliers
Weizhe Chen, Lantao Liu
|
|
Multi-Objective and Model-Predictive Tree Search for Spatiotemporal Informative Planning
Weizhe Chen, Lantao Liu
|
|
|
Long-Term Autonomous Ocean Monitoring with Streaming Samples |
|
Pareto Monte Carlo Tree Search for Multi-Objective Informative Planning
Weizhe Chen, Lantao Liu
|